
[Research Contribution] Trí tuệ cảm xúc cho robot: Khi robot Việt Nam biết “cảm nhận” và “thể hiện” cảm xúc như con người
30 Tháng Sáu, 2026
Từ khóa: Robot cảm xúc; Thung lũng kỳ lạ, Logic mờ; Nhân trắc học Việt Nam; Giao tiếp giữa con người–robot, thuật toán Fuzzy C-Means.
Trong bối cảnh robot xã hội ngày càng được ứng dụng rộng rãi trong giáo dục, y tế và dịch vụ, khả năng giao tiếp cảm xúc đang trở thành yếu tố quyết định để xây dựng sự tin tưởng giữa con người và máy móc. Nghiên cứu của nhóm tác giả thuộc Đại học Kinh tế Thành phố Hồ Chí Minh đã đề xuất mô hình kết hợp giữa Fuzzy C-Means (FCM), Fuzzy Inference System (FIS) và dữ liệu nhân trắc học người Việt Nam nhằm giúp robot nhận biết, diễn giải và biểu lộ cảm xúc một cách tự nhiên hơn. Kết quả nghiên cứu cho thấy hệ thống đạt độ chính xác lên đến 96% trong xác định trạng thái cảm xúc và 97% trong điều khiển biểu cảm khuôn mặt robot, mở ra triển vọng phát triển các thế hệ robot xã hội mang đậm dấu ấn Việt Nam.

Từ trí tuệ đến cảm xúc: Mảnh ghép còn thiếu của robot hiện đại
Trong những năm gần đây, trí tuệ nhân tạo (Artificial Intelligence – AI) đã giúp robot đạt được những bước tiến vượt bậc về khả năng nhận diện hình ảnh, xử lý ngôn ngữ và ra quyết định. Tuy nhiên, phần lớn các robot hiện nay vẫn chủ yếu hoạt động theo nguyên tắc “nhận lệnh – thực hiện lệnh”, thiếu đi khả năng biểu đạt cảm xúc – một yếu tố nền tảng trong giao tiếp của con người. Thực tế cho thấy, trong giao tiếp, con người không chỉ lắng nghe lời nói mà còn cảm nhận cảm xúc thông qua ánh mắt, nụ cười và những biểu cảm rất nhỏ trên khuôn mặt. Chính những tín hiệu phi ngôn ngữ này giúp tạo nên sự đồng cảm, tin cậy và kết nối cảm xúc. Vì vậy, câu hỏi đặt ra là: Làm thế nào để robot không chỉ “thông minh” mà còn có thể “thấu cảm”? Đây chính là động lực thúc đẩy nhóm nghiên cứu của UEH phát triển mô hình robot có khả năng hiểu và biểu đạt cảm xúc giống con người hơn, từ đó tạo nên những tương tác tự nhiên và nhân văn hơn giữa người và máy.
Rào cản tâm lý trong tương tác giữa con người và robot
Một trong những rào cản lớn nhất trong lĩnh vực robot hình người là hiện tượng được nhà nghiên cứu Masahiro Mori gọi là “Thung lũng kỳ lạ” (Uncanny Valley). Theo giả thuyết này, khi robot ngày càng giống con người, mức độ thiện cảm của con người đối với robot sẽ tăng lên. Tuy nhiên, đến một ngưỡng nhất định, thường khoảng 70% mức độ giống người, nếu robot vẫn còn những biểu cảm hoặc chuyển động thiếu tự nhiên, con người sẽ bắt đầu cảm thấy bất an, khó chịu hoặc thậm chí sợ hãi. Nói cách khác, một robot “gần giống người nhưng chưa đủ giống” có thể tạo ra cảm giác tiêu cực mạnh hơn cả một robot rõ ràng là máy móc. Điều này lý giải vì sao nhiều robot hiện đại dù có ngoại hình rất chân thực nhưng vẫn chưa được đón nhận rộng rãi trong các môi trường giao tiếp xã hội. Để vượt qua thách thức này, robot không chỉ cần có hình dáng giống người mà còn phải thể hiện được cảm xúc một cách mềm mại, tự nhiên và phù hợp với bối cảnh giao tiếp.
Thiết kế robot từ dữ liệu khuôn mặt người Việt
Nếu hiện tượng “Thung lũng kỳ lạ” xuất phát từ sự thiếu hài hòa giữa ngoại hình và biểu cảm của robot, thì việc xây dựng một khuôn mặt có tỷ lệ và đặc điểm gần gũi với con người là điều kiện tiên quyết để tạo cảm giác thân thiện trong giao tiếp. Trên cơ sở đó, nhóm nghiên cứu đã thu thập dữ liệu nhân trắc học từ 182 người Việt Nam với độ tuổi trung bình khoảng 22 tuổi, đồng thời tính toán 12 chỉ số quan trọng trên khuôn mặt như khoảng cách giữa hai mắt, chiều dài mũi, độ rộng miệng, chiều cao trán và các tỷ lệ hình thái đặc trưng khác (Hình 1). Bộ dữ liệu này được sử dụng để xây dựng mô hình đầu robot trong không gian ba chiều, tạo nên một khuôn mặt có cấu trúc hài hòa và phù hợp với đặc điểm nhân chủng học của người Việt. Bên cạnh việc thiết kế hình thái bên ngoài, nghiên cứu còn xác định 20 điểm mốc (facial landmarks) trên khuôn mặt để theo dõi sự dịch chuyển của các vùng cơ mặt trong quá trình biểu lộ cảm xúc. Đây là cơ sở quan trọng để chuyển đổi các biểu hiện cảm xúc của con người thành dữ liệu định lượng, phục vụ cho việc điều khiển các chuyển động trên khuôn mặt robot một cách chính xác và tự nhiên hơn.
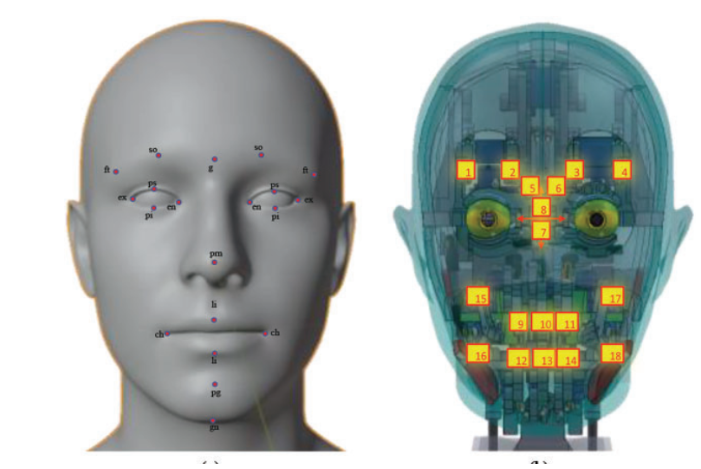
Hình 1: Dữ liệu nhân trắc học khuôn mặt và cấu trúc hệ thống truyền động được sử dụng để tái tạo biểu cảm cảm xúc trên robot. (Nguồn: Tác giả)
Từ cảm xúc con người đến biểu cảm của robot
Sau khi xây dựng được hệ thống các điểm mốc trên khuôn mặt, thách thức tiếp theo của nghiên cứu là làm thế nào để chuyển những trạng thái cảm xúc vốn rất trừu tượng của con người thành các chuyển động cụ thể trên khuôn mặt robot. Khác với các đại lượng vật lý có thể đo lường chính xác, cảm xúc thường mang tính chủ quan và tồn tại dưới nhiều mức độ khác nhau. Điển hình là, một người có thể “hơi vui”, “rất vui”, “khá bất ngờ” hoặc “hơi lo lắng”, những trạng thái khó có thể biểu diễn bằng các giá trị rời rạc. Để xử lý tính mơ hồ này, nghiên cứu đã ứng dụng Logic mờ – một phương pháp cho phép mô hình hóa cách con người nhận thức và diễn giải cảm xúc trong thực tế. Trước hết, thuật toán Fuzzy C-Means (FCM) được sử dụng để phân tích sự thay đổi của các điểm mốc trên khuôn mặt người và chuyển đổi chúng thành hai tham số tâm lý học cơ bản gồm Valence và Arousal. Trong đó, Valence phản ánh mức độ tích cực hoặc tiêu cực của cảm xúc, còn Arousal thể hiện cường độ hoặc mức độ kích hoạt cảm xúc. Ví dụ, trạng thái hạnh phúc thường có Valence dương, trong khi buồn bã có Valence âm; tương tự, cảm giác phấn khích sẽ có Arousal cao hơn nhiều so với trạng thái bình tĩnh (Hình 2). Nhờ cơ chế xử lý mờ, hệ thống không chỉ nhận diện các cảm xúc cơ bản như vui, buồn hay ngạc nhiên mà còn có thể phân biệt nhiều sắc thái cảm xúc trung gian với mức độ khác nhau. Điều này giúp robot hiểu được những biến đổi cảm xúc tinh tế hơn thay vì chỉ phản ứng theo các trạng thái cố định. Các giá trị Valence và Arousal sau đó được đưa vào hệ thống suy diễn mờ Fuzzy Inference System (FIS). Dựa trên tập hợp các quy tắc dạng “IF-THEN”, hệ thống sẽ chuyển đổi trạng thái cảm xúc thành các lệnh điều khiển cụ thể cho khuôn mặt robot. Ví dụ, khi mức Arousal cao và Valence tích cực, hệ thống sẽ điều khiển miệng mở rộng hơn, lông mày nâng lên và đôi mắt trở nên sinh động hơn để thể hiện cảm xúc vui vẻ hoặc hào hứng.
Để tái tạo các biểu cảm này, nhóm nghiên cứu đã thiết kế hệ thống gồm 18 động cơ đặt dưới lớp da mặt nhân tạo (Hình 1). Các động cơ được bố trí tương ứng với những nhóm cơ quan trọng trên khuôn mặt người, bao gồm 4 động cơ điều khiển lông mày, 2 động cơ cho mí mắt, 2 động cơ điều khiển chuyển động của mắt, 6 động cơ dành cho môi và 4 động cơ hỗ trợ chuyển động của hàm. Sự phối hợp đồng bộ của các động cơ này cho phép robot thực hiện nhiều chuyển động tinh tế như nhướng mày, chớp mắt, mỉm cười, mím môi hay mở rộng khẩu hình khi biểu lộ cảm xúc. Nhờ sự kết hợp giữa mô hình Logic mờ và hệ thống truyền động sinh học, robot không chỉ tái hiện được các cảm xúc cơ bản mà còn thể hiện được những trạng thái giàu sắc thái như vui nhẹ, phấn khích, ngạc nhiên thoáng qua hay lo lắng. Đây chính là yếu tố quan trọng giúp các biểu cảm trở nên tự nhiên hơn, góp phần thu hẹp khoảng cách giữa con người và máy móc trong quá trình giao tiếp.
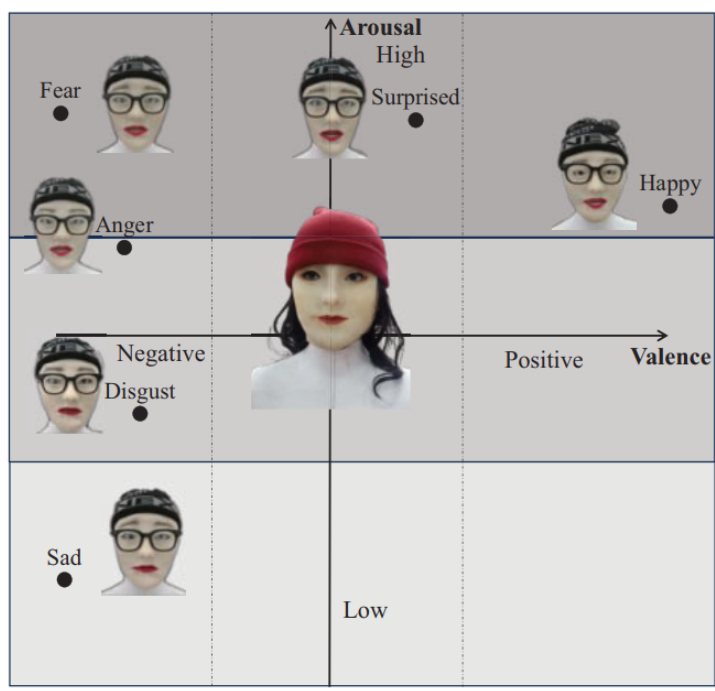
Hình 2: Biểu diễn sáu cảm xúc cơ bản của robot trên không gian cảm xúc Valence – Arousal, bao gồm hạnh phúc (Happy), ngạc nhiên (Surprised), sợ hãi (Fear), tức giận (Anger), ghê tởm (Disgust) và buồn bã (Sad). (Nguồn: Tác giả)
Từ biểu cảm tự nhiên đến những ứng dụng xã hội thực tiễn
Việc giúp robot biểu lộ được những cảm xúc tự nhiên như vui vẻ, ngạc nhiên hay lo lắng không chỉ góp phần thu hẹp khoảng cách giữa con người và máy móc trong giao tiếp, mà còn mở ra những hướng ứng dụng mới trong đời sống xã hội. Khi robot có khả năng hiểu và phản hồi cảm xúc phù hợp với từng tình huống, chúng có thể tham gia hiệu quả hơn vào các hoạt động giáo dục, chăm sóc sức khỏe và dịch vụ. Đây chính là giá trị cốt lõi mà nghiên cứu hướng tới: thu hẹp khoảng cách cảm xúc giữa con người và máy móc thông qua việc trang bị cho robot khả năng hiểu và phản hồi phù hợp với trạng thái cảm xúc của người đối diện. Tiềm năng ứng dụng của công nghệ này rất rộng, cụ thể là trong giáo dục, robot có thể đóng vai trò trợ giảng thông minh, nhận biết mức độ hứng thú hoặc căng thẳng của học sinh để điều chỉnh cách tương tác phù hợp hơn. Trong y tế và chăm sóc sức khỏe, robot có thể hỗ trợ người cao tuổi hoặc bệnh nhân bằng cách phát hiện những dấu hiệu lo âu, căng thẳng hay cô đơn, từ đó tạo ra các tương tác mang tính hỗ trợ tinh thần. Trong lĩnh vực dịch vụ và du lịch, robot có thể trở thành lễ tân hoặc hướng dẫn viên thông minh với khả năng giao tiếp linh hoạt, thân thiện và phù hợp với văn hóa Việt Nam. Những ứng dụng này cho thấy tương lai của robot không chỉ được quyết định bởi khả năng xử lý thông tin hay ra quyết định thông minh, mà còn bởi năng lực thấu hiểu và tương tác cảm xúc. Nói cách khác, bên cạnh trí tuệ nhân tạo, một xu hướng đang dần hình thành là trí tuệ cảm xúc nhân tạo (Artificial Emotional Intelligence) – nơi robot không chỉ giúp con người giải quyết công việc mà còn mang lại cảm giác được lắng nghe, thấu hiểu và đồng hành trong cuộc sống hằng ngày.
Như vậy, nghiên cứu đã chứng minh việc tích hợp dữ liệu nhân trắc học người Việt Nam với Logic mờ hoàn toàn có thể tạo ra các hệ thống robot có khả năng nhận diện và biểu đạt cảm xúc một cách tự nhiên, linh hoạt và mang tính nhân văn cao. Với hiệu quả ấn tượng trong nhận diện trạng thái cảm xúc lẫn điều khiển biểu cảm khuôn mặt, nghiên cứu không chỉ đóng góp về mặt học thuật trong lĩnh vực robot xã hội mà còn mở ra nhiều hướng ứng dụng thực tiễn trong giáo dục, y tế và dịch vụ. Quan trọng hơn, đây là một bước tiến trong hành trình phát triển các robot hình người “Made in Vietnam”, góp phần hiện thực hóa mục tiêu đưa Việt Nam trở thành một trong những trung tâm nghiên cứu và phát triển robot cảm xúc trong khu vực Đông Nam Á.
Tác giả: GS.TS. Nguyễn Trường Thịnh, TS. Nguyễn Minh Triều – Đại học Kinh tế Thành phố Hồ Chí Minh
Đây là bài viết nằm trong chuỗi bài lan tỏa nghiên cứu và kiến thức ứng dụng với thông điệp “Research Contribution For All – Nghiên Cứu Vì Cộng Đồng” do UEH phối hợp cùng Báo và Phát thanh, Truyền hình Khánh Hòa thực hiện nhằm mục tiêu đồng hành cùng sự phát triển bền vững của tỉnh Khánh Hòa. UEH trân trọng kính mời Quý độc giả cùng đón xem bản tin Tri thức khoa học tiếp theo.
Tin, ảnh: UEH
Giọng đọc: Thanh Kiều
[UEH 50 năm] Bản đồ Di sản A.116 đang dần được lấp đầy bởi những câu chuyện
21 Tháng Bảy, 2026


























































[Unbox Glo-cal Program] Vi vu Đông Nam Á cùng Chương trình Cử nhân ASIA Co-op
20 Tháng Mười Hai, 2025






[Research Contribution] Đồng đổi mới sáng tạo cho nền kinh tế đại dương bền vững
12 Tháng Mười Hai, 2025


![[ueh] 500x333](https://future.ueh.edu.vn/wp-content/uploads/2025/12/UEH-500x333-1-370x260.png)
[Research Contribution] Khám phá sự đối lập giữa nghiện thương hiệu và tình yêu thương hiệu
24 Tháng Mười Một, 2025

















[Research Contribution] Phát triển bền vững – Góc nhìn đa chiều về hạnh phúc
8 Tháng Mười, 2025


![1. [ueh] Thumb 500x333](https://future.ueh.edu.vn/wp-content/uploads/2025/10/1.-UEH-Thumb-500x333-1-370x260.png)
![1. [ueh] 500x333](https://future.ueh.edu.vn/wp-content/uploads/2025/09/1.-UEH-500x333-1-370x260.png)












































[Research Contribution] Những góc nhìn mới về tương lai của thế giới ảo
16 Tháng Sáu, 2025























![[ueh] 500x333](https://future.ueh.edu.vn/wp-content/uploads/2025/04/UEH-500X333-370x260.png)































[Podcast] Góp ý giải pháp phát triển giáo dục Đại học
5 Tháng Hai, 2025

[Podcast] Các yếu tố ảnh hưởng đến động lực học tập của sinh viên
22 Tháng Một, 2025


[Podcast] “Mô hình Campus thích ứng – Giải pháp dành cho Mekong bền vững”
13 Tháng Một, 2025



[Podcast] Đào tạo nhân lực Mekong tương lai: Trao quyền hành động bền vững
30 Tháng Mười Hai, 2024

[Podcast] Dự án Phát triển khung công bằng giao thoa nhằm khuyến khích khả năng đi bộ
30 Tháng Mười Hai, 2024










[Podcast] Chiến lược thiết kế hậu kỹ thuật số trong nghệ thuật truyền thông
27 Tháng Mười Một, 2024


[Podcast] Đồng sáng tạo và xây dựng cộng đồng ArtTech hướng tới tương lai bền vững
26 Tháng Mười Một, 2024



[Podcast] NFTs – Cuộc cách mạng nghệ thuật hay cơn sốt nhất thời?
18 Tháng Mười Một, 2024






[Podcast] CareFeeder – Giải pháp công nghệ hỗ trợ người già và bệnh nhân Parkinson tự ăn uống
11 Tháng Mười Một, 2024


[Podcast] Ứng dụng học máy trong phân tích dữ liệu quản trị nguồn nhân lực
11 Tháng Mười Một, 2024



[Podcast] Nghệ thuật dân gian thời 4.0: Múa rối nước tự động dựa trên nền tảng robot
7 Tháng Mười Một, 2024

[Podcast] Bứt phá hiệu suất sáng tạo nhân viên nhờ phản hồi mang tính phát triển
7 Tháng Mười Một, 2024

[Podcast] Giải pháp MPIA: Lối thoát tạm thời cho cuộc khủng hoảng thương mại quốc tế?
7 Tháng Mười Một, 2024






[Podcast] “Căn bệnh Hà Lan” trong việc nhận kiều hối và trường hợp Việt Nam
31 Tháng Mười, 2024



































[Podcast] Phong Cách Lãnh Đạo Đạo Đức Và Hành Vi Ngoài Vai Trò Của Công Chức
29 Tháng Bảy, 2024


[Podcast] Định Hình Chiến Lược Phát Triển Toàn Diện, Bền Vững Cho Đất Nước
25 Tháng Bảy, 2024





[Podcast] Mô Hình Đại Học Bền Vững Dành Cho Các Thị Trường Mới Nổi
19 Tháng Bảy, 2024

[Podcast] Những Tiếp Cận Mới Nhất Dành Cho Các Đại Học Bền Vững
11 Tháng Bảy, 2024







[Podcast] Tác Động Của Nguồn Nhân Lực Xanh Đến Các Mục Tiêu Về Môi Trường
24 Tháng Năm, 2024

Kinh Tế Xã Hội Và Sự Phát Thải CO2 Ở Việt Nam Giai Đoạn 1990 – 2018
23 Tháng Năm, 2024



Pháp Luật Dữ Liệu – Kỳ 1: Cần Một Cách Tiếp Cận Mới
15 Tháng Năm, 2024

[Podcast] Pháp Luật Dữ Liệu – Kỳ 1: Cần Một Cách Tiếp Cận Mới
14 Tháng Năm, 2024




Đánh Giá Quảng Cáo Trên Nền Tảng Tiktok
8 Tháng Năm, 2024

[Podcast] Đánh Giá Quảng Cáo Trên Nền Tảng Tiktok
7 Tháng Năm, 2024









[podcast] Phản Ứng Của Chính Sách Xã Hội Đối Với Đại Dịch Covid-19 Ở Một Số Quốc Gia (Kỳ 1)
8 Tháng Mười Hai, 2023

Promoting Learner Autonomy in English Language Learning (Part 2)
28 Tháng Mười Một, 2023



[Podcast] Ngoại giao kinh tế Việt Nam trong thời kỳ đổi mới và hội nhập quốc tế
10 Tháng Mười Một, 2023




ArtTech and sustainable development
27 Tháng Mười, 2023




Cộng đồng ArtTech đầu tiên tại Việt Nam – Một năm nhìn lại
9 Tháng Mười, 2023

ArtTech – Một xu hướng tương lai
5 Tháng Mười, 2023

ArtTech và phát triển bền vững
3 Tháng Mười, 2023



[Podcast] Máy Tính Và Công Nghệ “Không Đi Một Mình” – Phần 4
24 Tháng Bảy, 2023





[Podcast] Tác Động Của Đồng Tiền Kỹ Thuật Số Đến Tỷ Giá Hối Đoái
14 Tháng Mười Một, 2022





















[Podcast] Chuyển Đổi Số Trong Ngành Du Lịch Việt Nam
5 Tháng Năm, 2022





[Podcast] Chuyển Đổi Số Trong Lĩnh Vực Y Tế Ở Việt Nam
25 Tháng Ba, 2022

[Podcast] Phân Tích Dữ Liệu Con Người Tại Việt Nam
18 Tháng Ba, 2022

[Podcast] Chuyển Đổi Số Trong Nông Nghiệp Ở Việt Nam
11 Tháng Ba, 2022




[Podcast] Mô Hình Kinh Tế Chia sẻ: Các Vấn Đề Quản Lý Ở Việt Nam
21 Tháng Một, 2022

[Podcast] Nâng Cao Trải Nghiệm Khách Hàng Trực Tuyến Trong Ngành Du Lịch
15 Tháng Một, 2022


[Podcast] Chính Sách Lao Động Việc Làm Cho TP. HCM Trong Giai Đoạn Sau Giãn Cách
28 Tháng Mười Hai, 2021

[Podcast] Xây Dựng Thị Trường Chứng Khoán Phi Tập Trung Dựa Trên Công Nghệ Blockchain
24 Tháng Mười Hai, 2021

[Podcast] Học Tập Suốt Đời Trong Thế Giới Số: Góc Nhìn Từ Nghề Nghiệp Kế Toán, Kiểm toán
21 Tháng Mười Hai, 2021

[Podcast] Học Tập Suốt Đời Tại UEH: Hướng Đến Đại Học Bền Vững
14 Tháng Mười Hai, 2021

[Podcast] Xu Hướng Kinh Doanh Bán Lẻ Trực Tuyến Thời Kỳ Covid
10 Tháng Mười Hai, 2021

[Podcast] Big Data Cho Mục Tiêu Phát Triển Bền Vững: Kinh Nghiệm Quốc Tế
7 Tháng Mười Hai, 2021

[Podcast] Cải Cách Luật Đất Đai Để Thúc Đẩy Phát Triển Kinh Tế
2 Tháng Mười Hai, 2021

[Podcast] Cuộc Cách Mạng Trong Kinh Tế Học Thực Nghiệm
30 Tháng Mười Một, 2021



[Podcast] Chỉ Số Giá Tiêu Dùng Từ Góc Nhìn Khai Thác Dữ Liệu Lớn (Big Data)
17 Tháng Mười Một, 2021



[Podcast] Toàn Cảnh Tiền Tệ Kỹ Thuật Số – Phần 5 : Tiền Ổn Định Tư Nhân Diem
5 Tháng Mười Một, 2021



Đứt gãy chuỗi cung ứng vùng trọng điểm phía Nam: 8 giải pháp
20 Tháng Mười, 2021

[Podcast]Toàn Cảnh Tiền Tệ Kỹ Thuật Số – Phần 2: Những Cột Mốc Phát Triển
19 Tháng Mười, 2021

[Podcast] Toàn cảnh tiền tệ kỹ thuật số – Phần 1: Xu thế của thời đại
15 Tháng Mười, 2021


NGÂN HÀNG BẮT TAY FINTECH (Phần 3): Các Giải Pháp Hỗ Trợ
8 Tháng Mười, 2021

UEH chủ trì thành công Hội thảo ICBF 2021
7 Tháng Mười, 2021

GRSD 2021- Hội thảo khoa học “Tăng trưởng xanh và phát triển bền vững”
6 Tháng Mười, 2021

NGÂN HÀNG BẮT TAY FINTECH (phần 2): Chọn đối tác theo tiêu chí nào?
4 Tháng Mười, 2021

‘Đổi mới giáo dục nghề nghiệp là động cơ tăng trưởng kinh tế’
30 Tháng Chín, 2021




Giải pháp “mở cửa” an toàn với các khu công nghiệp tại TP Hồ Chí Minh
27 Tháng Chín, 2021


Khi cuộc sống “bình thường mới”, nơi ở cho người lao động cần được quan tâm
9 Tháng Chín, 2021

Hướng phát triển mô hình đào tạo luân phiên (Dual Education) tại Việt Nam
6 Tháng Chín, 2021

Webinar: Tương lai ngành Thẩm định giá trong thập niên mới
17 Tháng Tám, 2021

Hãy là người dùng thông minh khi đón nhận và chia sẻ thông tin
9 Tháng Tám, 2021


Webinar: An toàn thông tin kế toán trong kỷ nguyên số
3 Tháng Tám, 2021



Có nên đưa lãi suất tiền gửi VND về 0 phần trăm?
20 Tháng Bảy, 2021


Chu kỳ giảm giá của đồng USD?
TS. Đinh Thị Thu Hồng và nhóm nghiên cứu
26 Tháng Sáu, 2021

Việt Nam cần kịch bản cho thương mại tương lai
ThS. Tô Công Nguyên Bảo
26 Tháng Sáu, 2021

Hệ thống tiền tệ tiếp theo như thế nào?
TS. Lê Đạt Chí và nhóm nghiên cứu
26 Tháng Sáu, 2021

Chuyển đổi số trong trường đại học: Dạy học trực tuyến sẽ trở thành xu hướng tất yếu
GS.TS. Nguyễn Trọng Hoài
26 Tháng Sáu, 2021

Tiền số ngân hàng Trung ương – Vận hành và thử nghiệm
Châu Văn Thành
26 Tháng Sáu, 2021

Chuyển đổi số trong khu vực công tại Việt Nam
Khoa Quản lý nhà nước
26 Tháng Sáu, 2021


“Cấp cứu” doanh nghiệp trước làn sóng COVID-19 thứ 4
23 Tháng Sáu, 2021

Chuyên gia UEH: Việt Nam nên kết hợp tiêm vaccine miễn phí và dịch vụ
23 Tháng Sáu, 2021

Hội thảo khoa học về Thị trường bảo hiểm Việt Nam (Conference on Vietnam’s Insurance Industry – CVII)
Khoa Toán – Thống Kê
7 Tháng Sáu, 2021

Muốn có trung tâm tài chính phải có chiến lược thích ứng
Khoa Tài chính
5 Tháng Sáu, 2021

Cần đưa giao dịch công nghệ lên sàn chứng khoán
Bộ Khoa học và Công nghệ
5 Tháng Sáu, 2021

Sự hữu ích của Lý thuyết trò chơi: Thảo luận về giải Nobel Kinh tế năm 2020
JABES
5 Tháng Sáu, 2021

Đoán định tư pháp: Xu thế mới trong hành nghề Luật
Khoa Luật
5 Tháng Sáu, 2021

Thiết kế đô thị: tầm nhìn vững chắc cho đô thị bền vững
Viện Đô thị thông minh và Quản lý
5 Tháng Sáu, 2021

Phục hồi du lịch và nỗ lực thoát khỏi vòng xoáy ảnh hưởng bởi Covid-19
Viện Đô thị thông minh và Quản lý
5 Tháng Sáu, 2021

Nghiên cứu Kinh tế học lao động trong sự biến động của thế giới
JABES
5 Tháng Sáu, 2021

Kết hợp Nghệ thuật và Công nghệ hướng đến Thành phố thông minh đáng sống
Viện Đô thị thông minh và Quản lý
5 Tháng Sáu, 2021

Chuỗi bài “The Basics of B2B”: Thị trường việc làm rộng mở nhiều sinh viên chuyên ngành Marketing đang bỏ quên
TS. Đinh Tiên Minh
5 Tháng Sáu, 2021
Môi trường không phải để nhà đầu tư xài miễn phí!
TS. Phạm Khánh Nam
5 Tháng Sáu, 2021
2021 sẽ là năm khởi đầu của chu kỳ tăng trưởng mới
PGS.TS Nguyễn Khắc Quốc Bảo
5 Tháng Sáu, 2021

Quỹ vaccine sẽ khả thi khi có người dân đóng góp
Phạm Khánh Nam, Việt Dũng
5 Tháng Sáu, 2021

Kích thích kinh tế, gia tăng vận tốc dòng tiền
Quách Doanh Nghiệp
5 Tháng Sáu, 2021

Đi tìm chiến lược hậu Covid-19 cho doanh nghiệp bảo hiểm Việt Nam
PGS TS Nguyễn Khắc Quốc Bảo, ThS Lê Văn
5 Tháng Sáu, 2021

Insurtech – Cơ hội và thách thức cho Startup Việt
Ths. Lê Thị Hồng Hoa
5 Tháng Sáu, 2021